We develop products that offer a technological edge.
Our customers come from a wide range of industries:



Applications
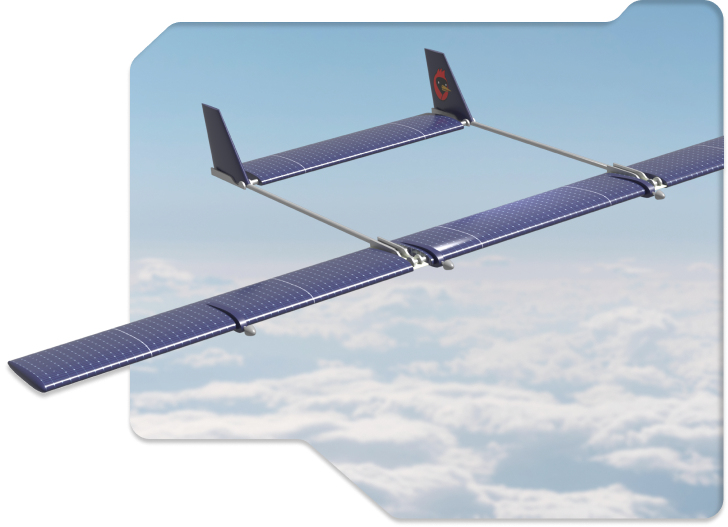
Zubax has an extensive IP portfolio and experience in the field of electric machines and drives. Electric motor drives developed by Zubax are among the best in the world in terms of energy efficiency, power-to-weight ratio, and reliability.
The Impossible Aerospace US-1 quadrotor has performed a record-setting 2-hour flight on a single battery charge, being equipped with a custom Zubax AmpDrive motor controller.
Applications
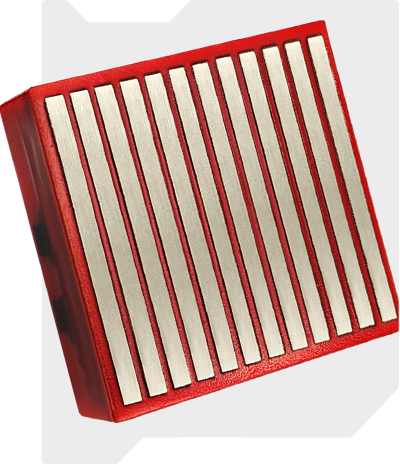
Zubax designs and manufactures novel solid-state electro-permanent magnetic (EPM) grippers for a wide range of industrial applications.
EPM grippers are a new class of actuators that are set to obsolete the traditional mechanical alternatives in robotics and drone applications. EPM grippers can be used with non-ferromagnetic objects as well with the help of special extension features.

Applications
OpenCyphal is a novel, highly reliable intravehicular distributed computing technology that enables onboard electronics to efficiently share data and computational workloads in real-time. It supports various transports, including Ethernet and CAN FD.
The benefits of using OpenCyphal are best understood in the context of complex, safety-critical systems, such as modern software-defined vehicles. These systems require numerous units and subsystems to communicate while adhering to strict timing constraints and reliability standards. OpenCyphal simplifies the development of such systems by providing simple and robust zero-cost abstractions.




