Quick start guide for Myxa
23 March, 2018
Pavel Kirienko
CEO & CTO
This post is a tentative quick start guide for Myxa motor controllers. It assumes that the user has a GNU/Linux enabled PC; support for Windows is going to be added pretty soon as well. If you have any questions or concerns, please send us an email to info@zubax.com, or post right here in the comments.
The user is advised to have a basic understanding of the field-oriented motor control theory.
Overall, the setup procedure is as follows:
- Configure the USB connection.
- Download the Kucher GUI tool.
- Connect the motor to Myxa (if you need to reverse the direction of rotation later, swap any two phases). The motor should be disconnected from any mechanical load (propellers, thrusters, gearboxes, etc), otherwise, the automatic motor identification procedure may return suboptimal results. You must not touch the motor while identification is in progress for the same reason.
- Connect Myxa to a power supply, and then to your PC via USB.
- Launch Kucher, specify the number of poles and the rated current of the motor. Launch the motor ID procedure.
That’s it. Should be pretty straightforward to get started. Please see the following video for a more hands-on guidance:
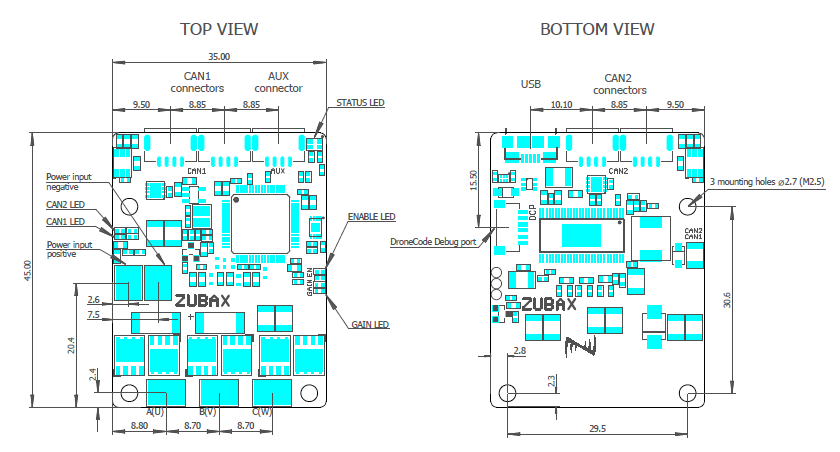
Geometry and connectors
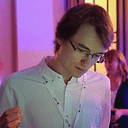
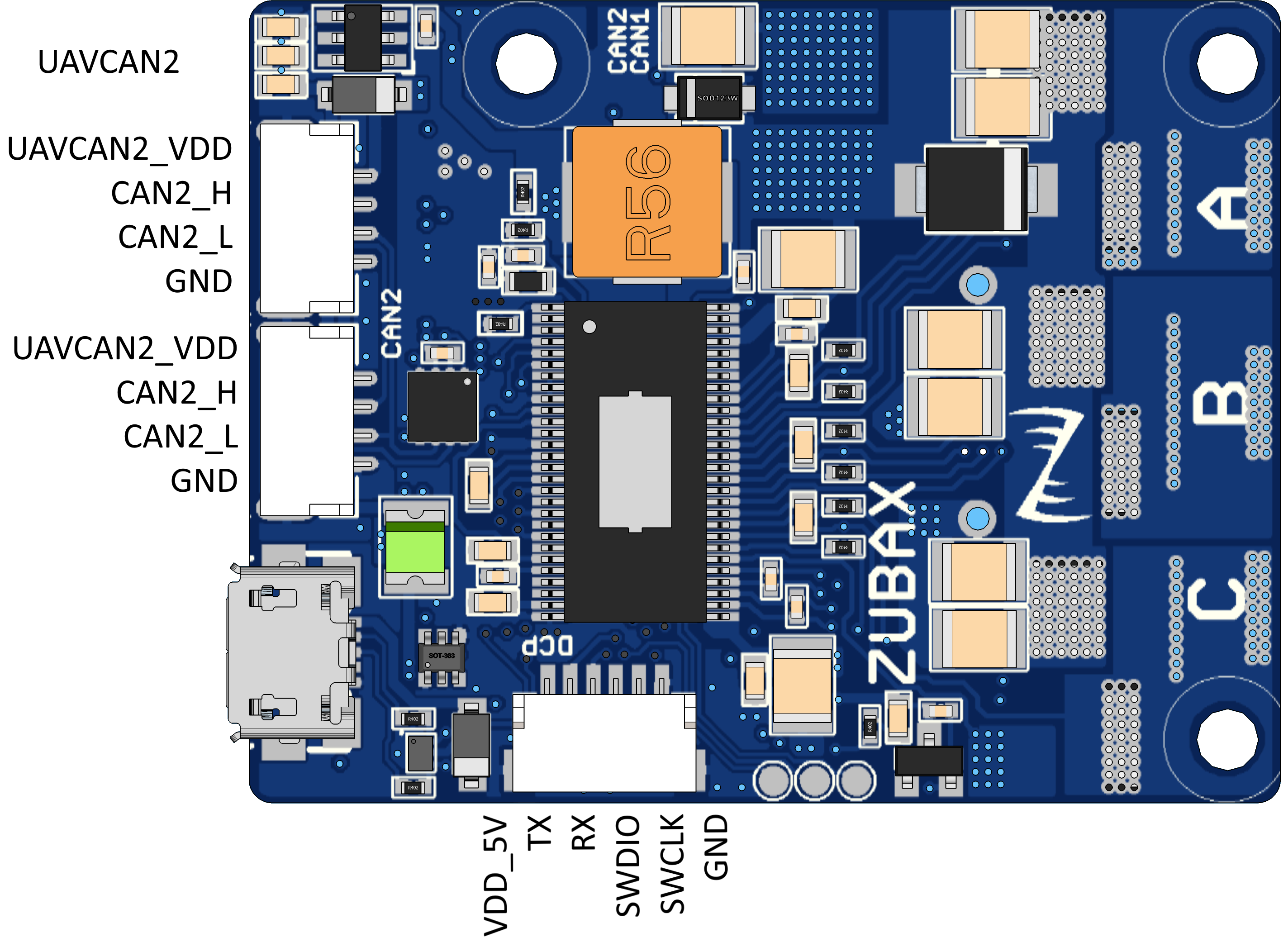
The images below document the placement and pinout of on-board connectors:
Bare board geometry:
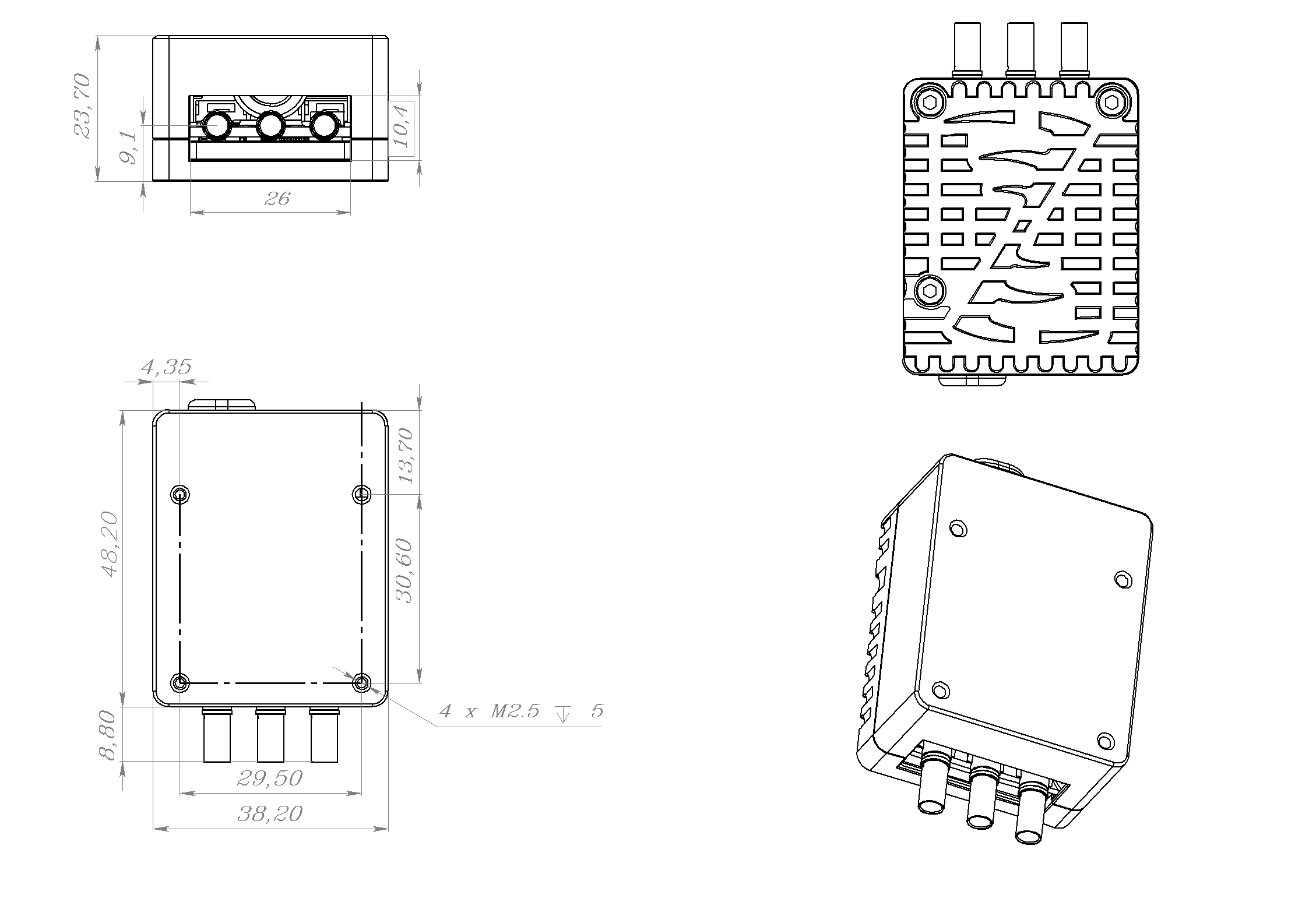
Aluminum enclosure geometry: