Products
Grippers
Electric drives
Sensors
R&D tools
Shop
Support
Services
Forum
Blog
About
Company
Careers
Contact
×
Products
Grippers
Electric drives
Sensors
R&D tools
Shop
Support
Services
Forum
Blog
About
Company
Careers
Contact
Home
>
Blog
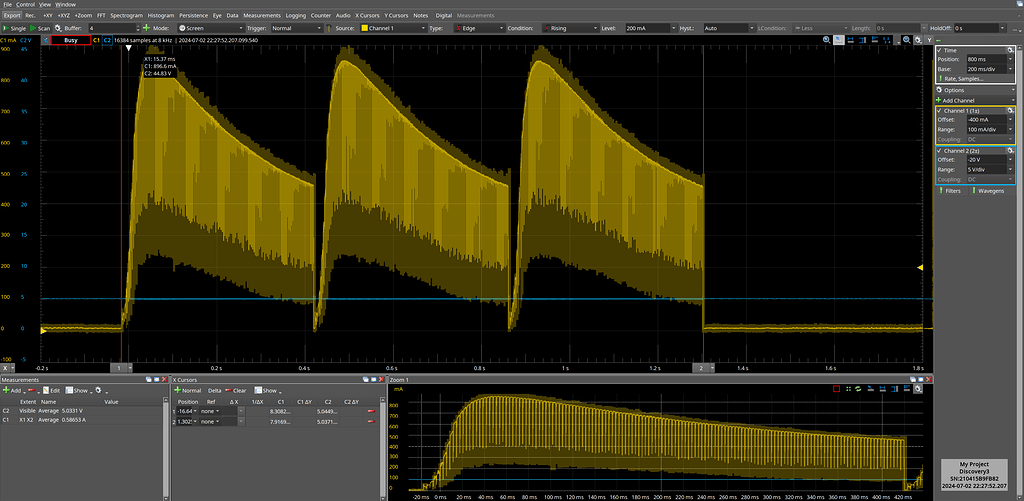
FluxGrip FG40 current consumption waveforms during magnetization
23 April, 2026
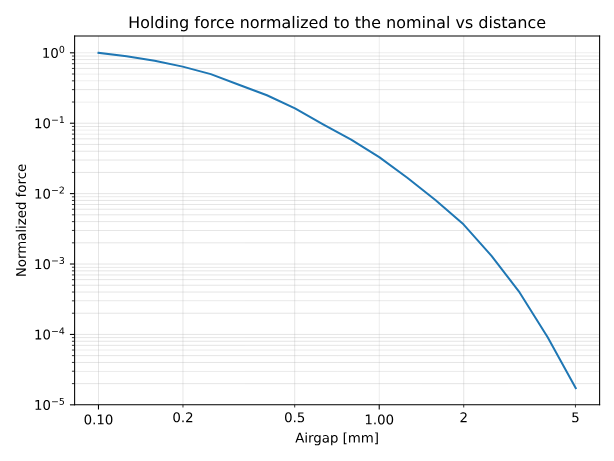
FG40 force vs. distance to target (airgap)
06 April, 2026
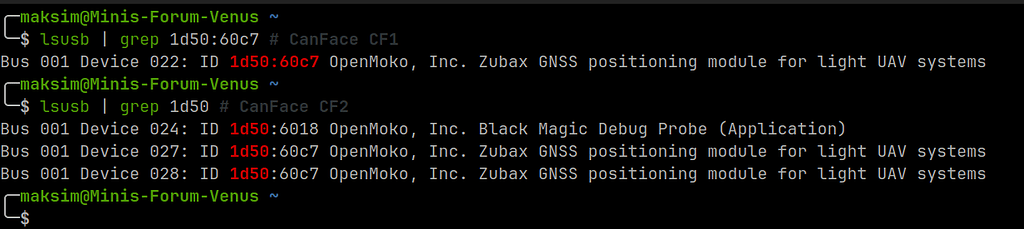
CanFace CF1/CF2: Quickstart Guide
05 April, 2026
Free FluxGrips for academia and makers!
27 March, 2026
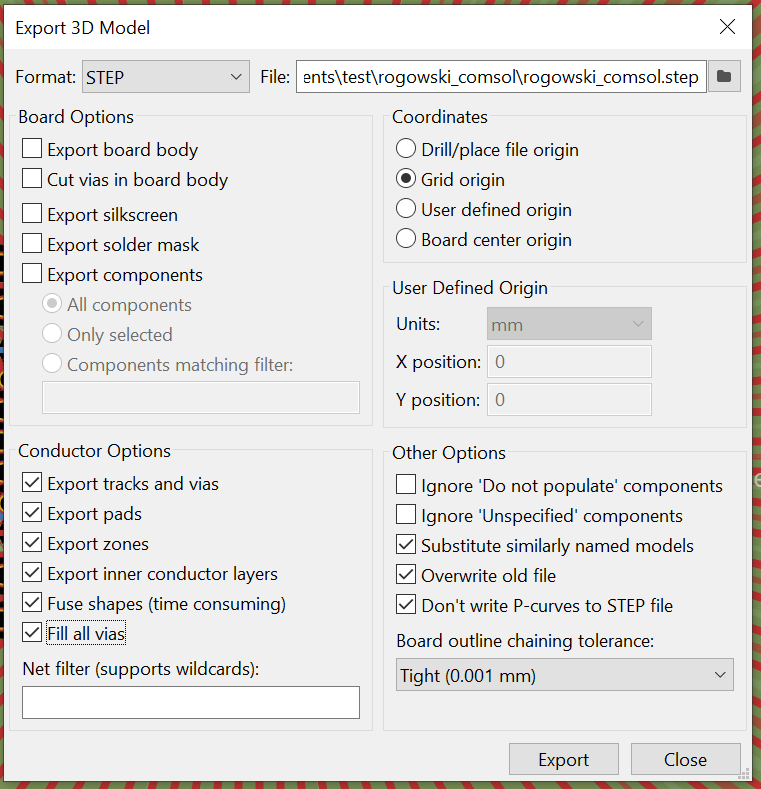
Working with complex CAD models in COMSOL Multiphysics
06 January, 2026
Email server outage and lost notifications
09 December, 2025
Do not send purchase orders via email!
06 November, 2025
The link to invoice is included in the order confirmation email!
06 October, 2025
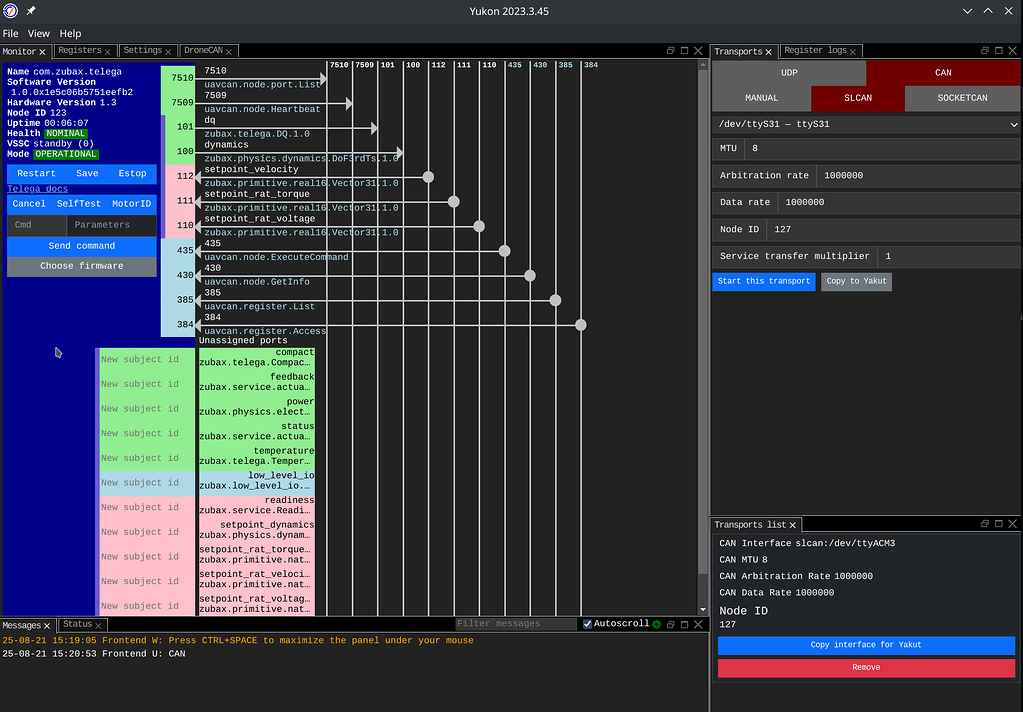
Updating AmpDrive firmware using Yukon
21 August, 2025
1
2
3