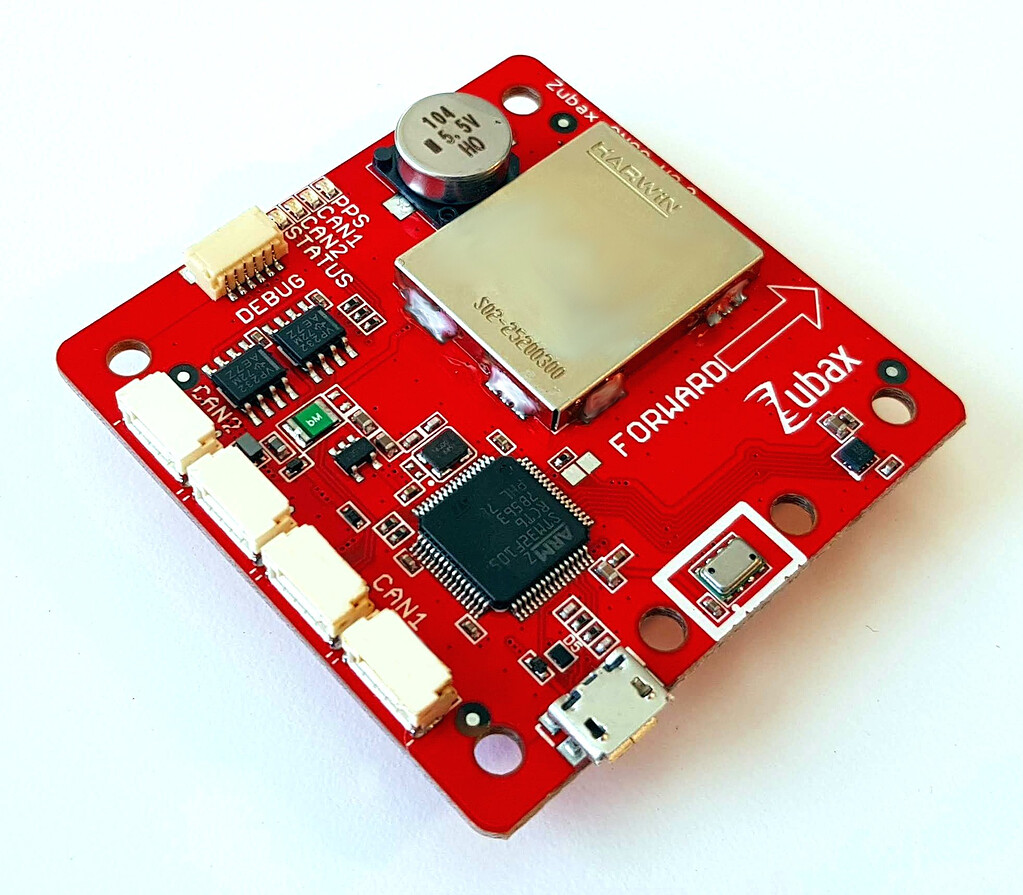





GS2 "GNSS 2" is a multipurpose high-performance board-level positioning module interfaced via CAN bus, USB, and UART. It includes a multi-system concurrent GPS + GLONASS + Galileo receiver, a high-precision barometric altimeter, and a 3-axis compass with thermal compensation. GS2 "GNSS 2" supports a variety of standard protocols, which ensures compatibility with third party software and hardware: DroneCAN, NMEA 0183 (over USB and UART), and the u-Blox M8 binary protocol.
Features
Sensors
- State-of-the-art concurrent GPS + GLONASS + Galileo receiver u-blox MAX-M8Q.
- Full RF shielding of the GNSS circuits ensures reliable operation in high-EMI environments.
- 35 mm high gain patch antenna with large ground plane for reliable reception even in deep urban canyons.
- Analog front end with LNA and SAW ensures high noise resilience.
- Supercapacitor-based backup power source enables low time-to-first-fix (a few seconds).
- Up to 15 Hz solution update rate.
- High precision digital barometer TE Connectivity MS5611.
- Altitude resolution 10 cm.
- High precision 3-axis digital compass STMicroelectronics LIS3MDL with thermal compensation.
Interfaces
- Doubly redundant CAN bus interface (UAVCAN v0).
- Continuous self diagnostic and failure detection outputs.
- Remote reconfiguration.
- Can be used in non-redundant mode as well (one interface will be inactive).
- Firmware upgrade.
- USB (virtual serial port interface).
- NMEA output for all sensors.
- Direct access to the u-blox module.
- Diagnostics and configuration via the command-line interface.
- Firmware upgrade.
- UART
- NMEA output for all sensors.
General
- Top notch positioning performance.
- Extensive, continuous self diagnostics and failure detection make GS2 "GNSS 2" a favorable choice for mission-critical applications.
- Compact size.
- High quality assurance:
- Every manufactured unit undergoes a rigorous testing procedure. The testing log for each produced unit is available on the web.
- Protection against unlicensed (counterfeit) production by means of a digital signature installed on every manufactured unit.
For low-volume orders, please proceed to the online store. For large orders and long-term supply options, please get in touch.