




AmpDrive AD0505 "Myxa" is a high-end FOC ESC based on the Télega motor control technology.
AmpDrive AD0505 "Myxa" is designed for use in propulsion systems of light unmanned aerial (UAV), underwater, and surface vehicles. The controller provides up to 1200 W of continuous power output and supports a wide range of operating voltages 13–51 V (Li-ion 4–12 S).
State-of-the-art vector control algorithms make AD0505 "Myxa" one of the most energy-efficient ESC on the market. In the UAV field, the vector control technology is also known as field-oriented control, sine wave drive, or just FOC. Unlike other vector control solutions, Myxa is compatible with virtually any PMSM or BLDC motor, and is able to measure the parameters of the driven motor and automatically optimize itself for best performance.
Variants
- Myxa A — optimized for cost-sensitive applications.
- Myxa B — optimized for mission-critical applications.
Each type is available in several modifications which are reviewed in the table. Regardless of the chosen enclosure option, all versions of Myxa are conformal-coated, which provides resilience against moisture, aggressive chemicals, corrosion, and abrasion.
| Variant | Description | Mass, g | Dimensions, mm | Rated power, W | Redundant CAN | BEC output | Oper. temp, °C |
|---|---|---|---|---|---|---|---|
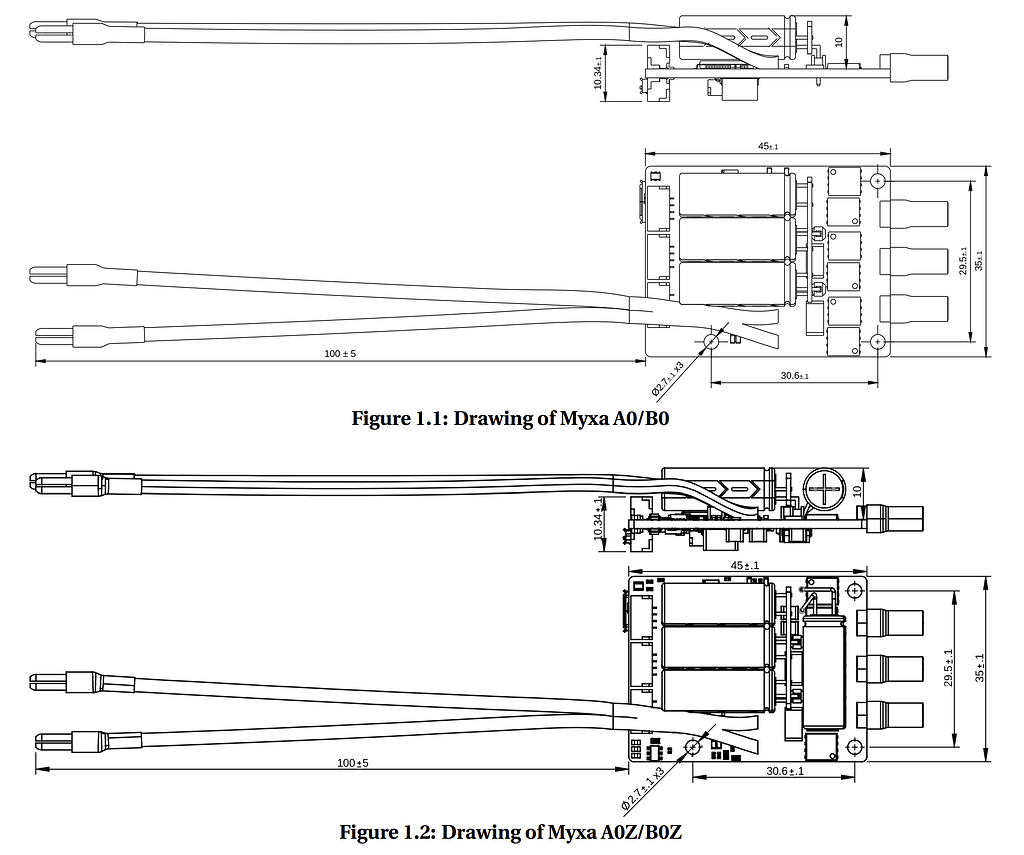
| Myxa A0 | Board-level | 26 | 55✕35✕19 | 850 | -40 to 85 | ||
| Myxa A0Z | Board-level | 28 | 55✕35✕19 | 1200 | -40 to 105 | ||
| Myxa A1 | Polyolefin envelope | 27 | 55✕36✕20 | 400 | -40 to 85 | ||
| Myxa A2 | Aluminum enclosure | 55 | 57✕38✕24 | 850 | -40 to 85 | ||
| Myxa A2Z | Aluminum enclosure | 57 | 57✕38✕24 | 1200 | -40 to 105 | ||
| Myxa B0 | Board-level | 26 | 55✕35✕19 | 850 | DMR | 5 V, 250 mA | -40 to 85 |
| Myxa B0Z | Board-level | 28 | 55✕35✕19 | 1200 | DMR | 5 V, 250 mA | -40 to 105 |
| Myxa B1 | Polyolefin envelope | 27 | 55✕36✕20 | 400 | DMR | 5 V, 250 mA | -40 to 85 |
| Myxa B2 | Aluminum enclosure | 55 | 57✕38✕24 | 850 | DMR | 5 V, 250 mA | -40 to 85 |
| Myxa B2Z | Aluminum enclosure | 57 | 57✕38✕24 | 1200 | DMR | 5 V, 250 mA | -40 to 105 |
For low-volume orders, please proceed to the online store. For large orders and long-term supply options, please get in touch.