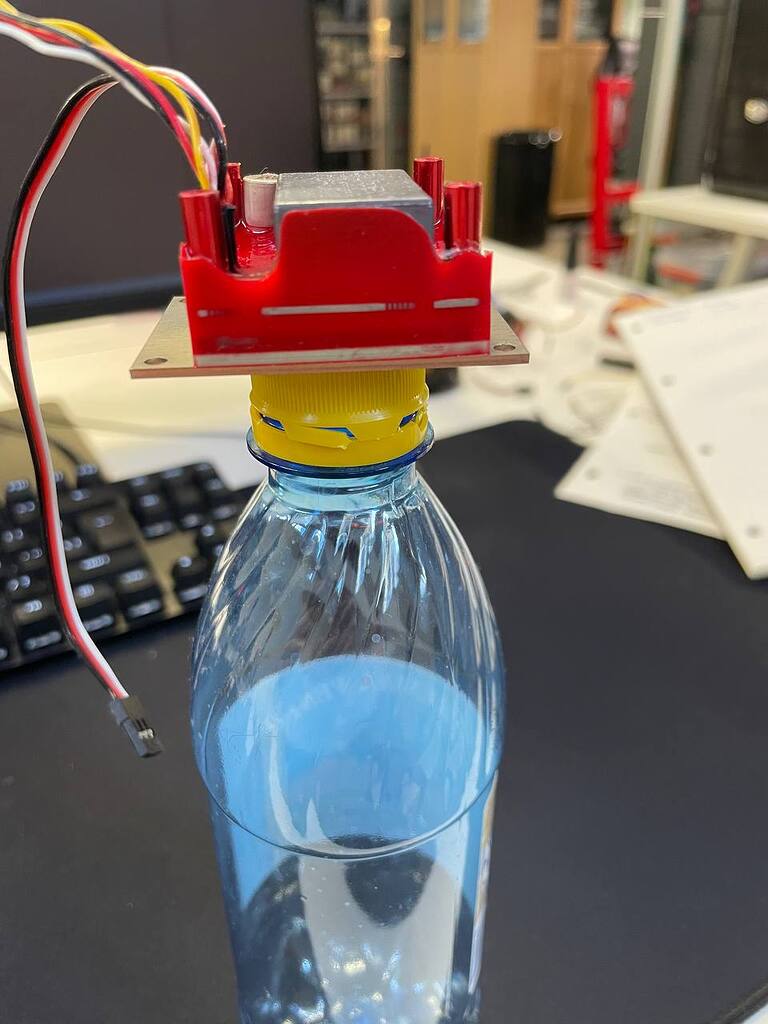
Grippers
Novel solid-state electro-permanent magnetic (EPM) grippers for critical applications. EPM grippers are a new class of actuators that are set to obsolete the traditional mechanical alternatives in robotics and drone applications. EPM grippers can be used with non-ferromagnetic objects as well with the help of special extension features.
Zubax Robotics provides customized solutions for grippers and other EPM-based actuators upon request. Please contact us to discuss your project.
Customer stories
“FluxGrip’s holding force exceeds the published spec, making it a perfect match for our robots. Integration was straightforward, and Zubax’s technical support has been exemplary. We recommend FluxGrip without reservation.”
— Miguel Serrano (CEO of INSTOR Projetos e Robotica)
“FluxGrip worked well with our trailer design for our ground vehicle. It was very easy to set up, just like a regular servo. The holding force is top notch and it never failed to grip any item at any terrain.”
— Mark Austria (CS Student at California State University, Long Beach)
Discussions








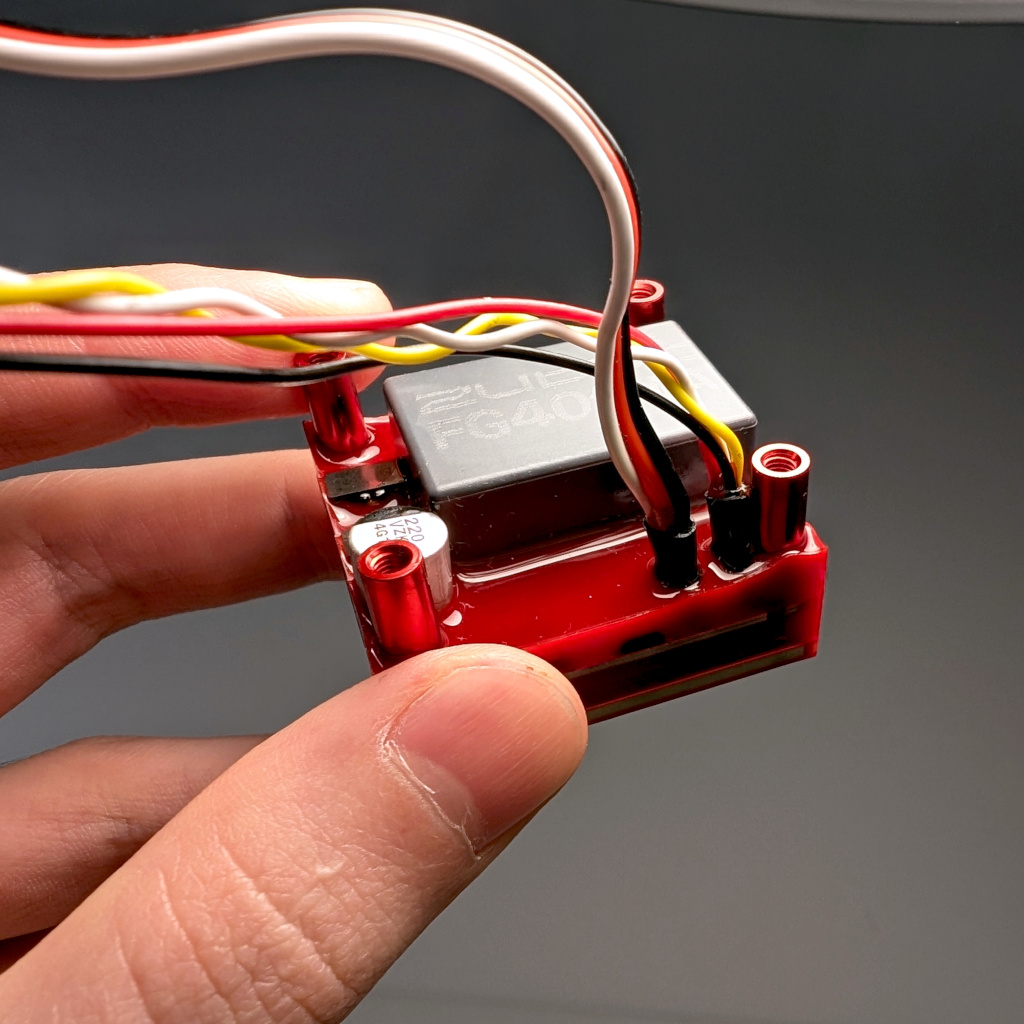
Electric drives
Efficient, high-performance electric motor drives, ESC, motor control software, and HITL/SITL simulation.
Zubax has an extensive IP portfolio and experience in the field of electric machines and drives. Electric motor drives developed by Zubax are among the best in the world in terms of energy efficiency, power-to-weight ratio, and reliability.
The Impossible Aerospace US-1 quadrotor has performed a record-setting 2-hour flight on a single battery charge, being equipped with a custom Zubax AmpDrive motor controller utilizing the Telega firmware.
Customer stories
“I want to express my gratitude to you for such a successful controller, it really allowed to increase the flight duration of one of our production vehicles by 25%.”
— Lipovy Andrey (Chief Designer at Spaitech LLC)
“Today I had a chance for a first "serious” test. It was done with 6S, so maximum thrust was “only” 5 kg. But it may be interesting for you, that we could achieve 3.1 kg thrust with only about 200W - which means 16 g/W efficiency. A pretty good value at 3.1 kg. It looks like your ESC is already a winner for us! Test video.“
— Helge Hackbarth (Managing Director at KopterKraft OÜ)
"We took a known problematic motor that would always get bogged down in rapid acceleration and skip and [Zubax ESC] made it work. Quality is top notch […], no corners cut on that.”
— Ryan Johnston (CEO at Applied Aeronautics)
“[Zubax AmpDrive] played a pivotal role in our success, providing reliability and outstanding functionality/integration with superior battery efficiency. Thanks to [Zubax’s] support, our drone effectively lowered battery depletion, enabling us to power our onboard navigation and computer, furthermore benefiting overall performance.”
— Maya Tout (Business Member at AmadorUAVs)
Discussions














R&D tools
Professional development tools for R&D in robotics and autonomy: interface adapters, debuggers, dynamo stands, and more.
Customer stories
“My experience with Zubax CANFace is very positive. It is helping me a lot to develop my projects, and is a very useful tool. Its simplicity and effectiveness are of great value. Thanks for your great product and communication protocol!”
— Marcel Lucas Fernandes de Siqueira (Electronics Engineer at Turbomachine)




